rosAFE, a ROS auditory front-end¶
Installation¶
Requirements¶
/rosAFE is a ROS node which is generated thanks to the GenoM3 tool. As
a first step, all these softwares must then be installed beforehand, see the
detailed installation instructions here. In short,
you will have to install:
- the ROS package
ros-indigo-ros-base, - Matlab, if needed,
- the GenoM3 tool, by using robotpkg, which is a compilation framework and packaging system for robotics software,
- the BASS streaming server.
Then, the C++ openAFE library must be installed on the system, see the
installation instructions here. In short, you will
have to:
- install the libraries
libboost1.54-all-devandlib-fftw3-dev, - compile the library
openAFEfrom its source code.
You also need to install the Audio Processing Framework library (APF). APF is a collection of C++ code which has been written in the context of multichannel audio applications. However, many modules have a more generic scope, and this library provides some filter implementations of interest. This library must be installed by hand, by cloning its repository. Since it is a header-only library, you only need to copy header files in the adequate folder:
$ cd
$ git clone https://github.com/AudioProcessingFramework/apf/
$ cd apf
$ sudo cp -r apf /usr/local/include
/rosAFE installation¶
At first, you will have to clone the /rosAFE repository, in your home directory
for instance:
$ cd
$ git clone https://github.com/TWOEARS/rosAFE
You then have to install the /rosAFE GenoM3/ROS component from sources, following
the guideline in the Installation of the robotic tools section. The cloned repository contains a
description file of the component which will be used by GenoM3 to generate the ROS
node by applying the following commands:
$ cd rosAFE
$ genom3 skeleton -i -l c++ rosAFE.gen #(enter 'n' to the asked question)
$ ./bootstrap.sh
$ mkdir build && cd build
$ ../configure --prefix=$ROBOTPKG_BASE --with-templates=ros/server,ros/client/c,ros/client/ros
$ make install
Design and description of the module¶
The algorithmic core of the AFE is made of the C/C++ openAFE library, which implements
–when possible– multi-threading and parallel computations inside one processor. But considering
the tree of processor shown in Fig. 10, one can also highlight another level
of parallelization between processors. This concurrency property is discussed in the
following, together with its actual implementation.
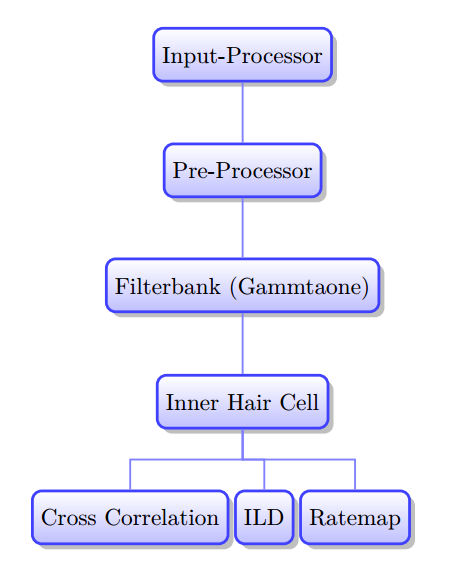
Fig. 10 Tree of processors. Each processor is represented as a box, which can be connected to one other. In this tree, Inner Hair Cell is the child of Filterbank, and Filterbank is then the parent of Inner Hair Cell.
From this processor tree, only the root processor, i.e. the input processor, will read audio data
from another component of the architecture (the ROS /bass node). Other processors are connected
to each others with a parent/child structure, thus highlighting two kinds of concurrency between them:
- Vertical concurrency: while a processor works on a resource delivered by its parent,
the parent can already prepare the next resource. This kind of concurrency concerns for instance the
Inputprocessor, thePre-processor, thegammatoneprocessor and theIHCprocessor in Fig. 10. - Horizontal concurrency: children of a processor are mutually independent and can
process concurrently their parent’s output. This kind of concurrency concerns the cross-correlation
processor, the
ILDprocessor and theRatemapprocessor in Fig. 10, all of them having the same parent (theIHCprocessor).
A processor takes an input resource from its parent and produces an output resource to its children. Each child could make its own local copy of the output resource, but this would lead to high memory needs in a tree that involves many children of a processor. Instead, it is proposed that children of a same parent share read access to a single memory zone, managed by the parent. In addition, the parent processor owns a private memory zone for its internal computation. With this memory management plan, each processor can be formalized by a state machine, as shown in Fig. 11. A processor goes through four distinct states, in a loop:
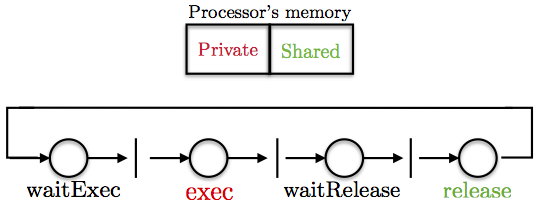
Fig. 11 State machine and memory management of a processor.
- waitExec: The processor is ready to read a new input resource, coming from its parent;
- exec: As soon as its parent releases the resource, the processor performs its computation. It reads the input resource from its parent’s shared memory zone, and stores the result of the computation—its output resource—in its own private memory zone;
- waitRelease: The processor stays in a waiting state while its children are still processing the previous output resource it has released. Children lock the processor’s shared memory zone;
- release: Once all children are done processing the previous output resource, the processor can release the new one: it copies the content of its private memory zone to its shared memory zone.
Additionally to these 4 functional states, the implementation requires the definition of the start, stop and delete states to respectively initialize, stop and remove a processor from the processing tree. These are not represented in Fig. 11.
On this basis, processors concurrency is implemented the following way.
Vertical concurrency¶
Considering a serial chain of 3 processors, the interaction between the three states machines describing each processor can be summarized as:
- while in waitExec state,
processor 2needs a token issued after the release state of its parent (processor 1) in order to fire the transition to the process state; - while in waitRelease state,
processor 2needs a token issued after the process state of its child (processor 3) in order to fire the transition to the release state.
This functioning is summarized in Fig. 12.
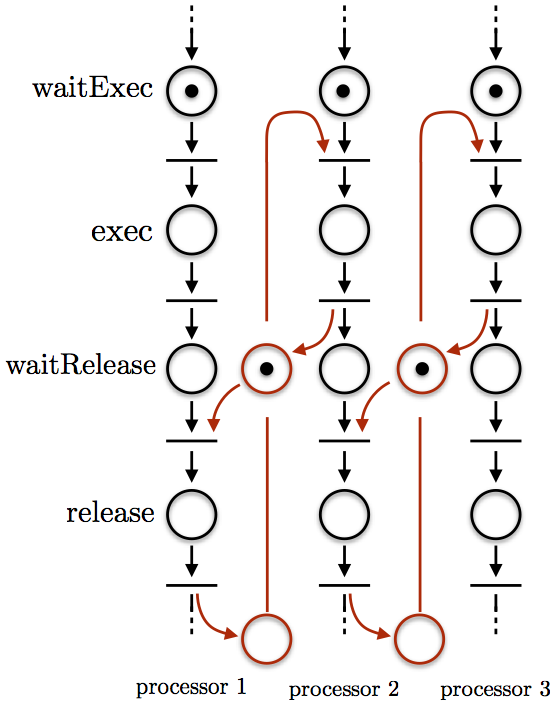
Fig. 12 Petri net for a serial chain of processors, highlighting vertical concurrency between 3 processors
Horizontal concurrency¶
Considering a parallel chain of two processors, both connected to the same father, the interaction between the three states machines describing each processor can be summarized as:
- when the parent processor
parentleaves its release state, it issues individual tokens allowing each child (child 1andchild 2) to fire the transition from waitExec to exec state. - once a child leaves its Process state, it issues one token. The parent processor needs as many tokens as it has children (two, here) to fire the transition from waitRelease} to release state.
This is summarized in Fig. 13.

Fig. 13 Petri net for a parallel chain of processors, highlighting horizontal concurrency between 2 processors.
Actual implementation¶
Differently from the MATLAB implementation of the AFE, a GenoM3 module enables concurrent processing. In view of the many concurrency and synchronization properties previously outlined, GenoM3 facilitates the specifications writing and the development of the ROS AFE thanks to the synthetic description of the module in a text file and the automatic generation of real time code for ROS.
This description file, called the dotgen file and with the .gen extension, is directly
available at the root of the repository. This file gathers in a single place all the definitions related to the
component’s interface, needed to interact with it. Among others, one can mention:
- activities, implementing the algorithmic core of the module.
- tasks, in which an activity is executed.
- internal data structure (IDS), which allows to share data between tasks of the component.
- ports, which implement the data flow between components as a publish/subscribe model.
- and functions, which are dedicated to small operations which should be executed and finished almost instantaneously.
How-to use /rosAFE to compute auditory representations¶
Available processors in /rosAFE are listed in the processing tree shown in
Fig. 10, which also exhibits the dependencies between them.
/rosAFE can compute as many audio representations as needed. However each processor must have
a unique name. This name is given by the user while requesting the processor and can not be changed
after. /rosAFE still requires the user to setup the processing tree by hand, i.e. by creating
each successive processors to obtained the requested audio representation. This requirement is relaxed
when using the Matlab client to /rosAFE, see the Matlab client to rosAFE section.
Setting a processors tree then requires each processor instantiation to contain the name of its first
dependency, i.e. must specify to which output its input is connected to.
Launching the module¶
/rosAFE requires the ROS master node, genomix and BASS to be running. To do so, use the
following commands:
$ roscore &
$ genomixd &
$ bass-ros &
$ rosAFE-ros &
In this guide, eltclsh is used to communicate with the ROS/GenoM3 nodes. eltclsh acts as a TCL client to ROS via genomix, and can be used to send requests to every component it is connected to. Setting up eltclsh is easy and only requires to load a specific TCL module coming up with all the robotic tools.
$ eltclsh
>> eltclsh > package require genomix
Still in eltclsh, one then need to load BASS and /rosAFE interfaces to make eltclsh aware of
all the available components requests:
>> eltclsh > set g [::genomix::connect]
>> eltclsh > $g load bass; $g load rosAFE;
Now, you should connect the output port of BASS to the input port of the /rosAFE.
>> eltclsh > ::rosAFE::connect_port Audio bass/Audio;
Finally, you can start the audio acquisition and data streaming to /rosAFE:
>> eltclsh > ::bass::Acquire {device hw:1,0 sampleRate 44100 nFramesPerChunk 2205 nChunksOnPort 20} &
The parameters used in the above command are documented in the BASS section and can be changed accordingly.
RosAFE Services¶
The file rosAFE.gen in the root of the repository directory contains the definitions and
the descriptions of the services offered by /rosAFE. This section lists them and provides
additional details concerning their parameters.
Requesting processors¶
InputProcservice:
This service is used to launch the
InputProcprocessor, which loads the raw audio signals coming from BASS to/rosAFE.Note
The connection between the output Audio port of BASS and the input port of the
/rosAFEmust be established before requesting this service.
Table 6 Input parameters of the InputProcservice of/rosAFE.¶Name Data type Default value Documentation name string input Name of the activity bufferSize_s_port double 1 Buffer size in seconds, see Section XX bufferSize_s_getSignal double 1 Buffer size in seconds, see Section XX The
InputProcprocessor is instantiated with the following command launched from eltclsh:$ eltclsh > ::rosAFE::InputProc {name input nFramesPerBlock 12000 bufferSize_s_port 1 bufferSize_s_getSignal 1} &
PreProcservice:
This service is used to launch the
PreProcprocessor.
Table 7 Input parameters of the PreProcservice of RosAFE¶Name Data type Default value Documentation name string preProc The name of this activity upperDepName string input The name of the upper dependency pp_bRemoveDC boolean 0 Flag to activate the DC-removal high-pass filter pp_cutoffHzDC double 20 Cutoff frequency (Hz) of DC-removal high-pass filter pp_bPreEmphasis boolean 0 Flag to activate pre-Emphasis pp_coefPreEmphasis double 0.97 Coefficient for pre-emphasis compensation (usually between 0.9 and 1) pp_bNormalizeRMS boolean 0 Flag to activate binaural RMSnormalization pp_intTimeSecRMS double 0.5 Time constant (s) for automatic gain control pp_bLevelScaling boolean 0 Flag to activate the level scaling pp_refSPLdBS double 100 Reference dB SPL value to correspond to input signal RMS value of 1 pp_bMiddleEarFiltering boolean 0 Flag to activate middle ear filtering pp_middleEarModel string jepsen Middle ear filter model (jepsen or lopezpoveda) pp_bUnityComp boolean 0 Compensation to have maximum of unity gain for middle ear filter The
PreProcprocessor is instanciated with the following command launched from eltclsh:>> eltclsh > ::rosAFE::PreProc {name preProc upperDepName input pp_bRemoveDC 0 pp_cutoffHzDC 20 pp_bPreEmphasis 0 pp_coefPreEmphasis 0.97 pp_bNormalizeRMS 0 pp_intTimeSecRMS 0.5 pp_bLevelScaling 0 pp_refSPLdB 100 pp_bMiddleEarFiltering 0 pp_middleEarModel jespen pp_bUnityComp 0} &
Gammatoneservice:This service is used to launch the
Gammatonefilterbank processorTable 8 Input parameters of the Gammatoneservice of RosAFE¶Name Data type Default value Documentation name string gammatone The name of this activity upperDepName string preProc The name of the upper dependency fb_type string string Filterbank type (gammatone or drnl) fb_lowFreqHz double 80 Lowest center frequency fb_highFreqHz double 8000 Highest center frequency fb_nERBs double 1 Distance between neighboring filters in ERBs fb_nChannels unsigned long 0 Number of channels fb_cfHz sequence<double> {} Channels center frequencies (Hz) fb_nGamma unsigned long 4 Gammatone rising slope order fb_bwERBs double 1.0180 Bandwidth of the filters in ERBs The
Gammatoneprocessor is instantiated with the following command launched from eltclsh:>> eltclsh > ::rosAFE::GammatoneProc {name gammatone upperDepName preProc fb_type gammatone fb_lowFreqHz 80 fb_highFreqHz 8000 fb_nERBs 1 fb_nChannels 0 fb_cfHz {} fb_nGamma 4 fb_bwERBs 1.018}
IhcProcservice:This service is used to request an Inner Hair Cell representation.
Table 9 Input parameters of the IhcProcservice of RosAFE¶Name Data type Default value Documentation name string ihc The name of this activity upperDepName string gammatone The name of the upper dependency ihc_method string dau The IHC method name (none, halfwave, fullwave, square, dau) The
IhcProcprocessor is instantiated with the following command launched from eltclsh:>> eltclsh > ::rosAFE::IhcProc {name ihc upperDepName gammatone ihc_method dau}
IldProcservice:
This service is used to request an Interaural Level Difference processor.
Table 10 Input parameters of the IldProcservice of RosAFE¶Port Type Data type Default value Documentation name string ild The name of this ild processor upperDepName string ihc The name of the upper dependencie ild_wname string hann Window name ild_wSizeSec double 0.02 Window duration (s) ild_hSizeSec double 0.01 Window step size (s) The
IldProcprocessor is instantiated with the following command launched from eltclsh:
>> eltclsh > ::rosAFE::IldProc {name ild upperDepName ihc ild_wname hann ild_wSizeSec 0.02 ild_hSizeSec 0.01} &
Ratemapservice:This service is used to request a
Ratemapprocessor.Table 11 Input parameters of the Ratemapservice of RosAFE¶Port Type Data type Default value Documentation name string ratemap The name of this ratemap processor upperDepName string ihc The name of the upper dependency rm_wname string hann Window name rm_wSizeSec double 20E-3 Window duration (s) rm_hSizeSec double 10E-3 Window step size (s) rm_scaling string power Scaling type (power or magnitude) rm_decaySec double 0.008 Signal-smoothing leaky integrator time constant The
Ratemapprocessor is instantiated with the following command launched from eltclsh:
>> eltclsh > ::rosAFE::RatemapProc {name ratemap upperDepName ihc rm_wname hann rm_wSizeSec 0.02 rm_hSizeSec 0.01 rm_scaling power rm_decaySec 0.008} &
Cross Correlationservice:This service is used to request a
CrossCorrelationprocessor.Table 12 Input parameters of the CrossCorrelationservice of RosAFE¶Name Data type Default value Documentation name string ratemap The name of this ratemap processor upperDepName string ihc The name of the upper dependency cc_wSizeSec double 20E-3 Window duration in seconds cc_hSizeSec double 10E-3 Step size between windows in seconds cc_wname string hann Window shape descriptor cc_maxDelaySec double 0.0011 Maximum delay in cross-correlation computation in seconds The
CrossCorrelationprocessor is instantiated with the following command launched from eltclsh:
>> eltclsh > ::rosAFE::CrossCorrelationProc {name crosscorrelation upperDepName ihc cc_wSizeSec 0.02 cc_hSizeSec 0.01 cc_maxDelaySec 0.0011 cc_wname hann} &
Other Services¶
modifyParameterservice:This service is dedicated to on-the-fly processor parameters modifications.
Table 13 Input parameters of the modifyParameterservice of RosAFE¶Name Data type Default value Documentation nameProc string The name of the processor to change the parameter nameParam string The name of the parameter to be changed newValue string The new value of the parameter to be changed Usage:
>> eltclsh > :: rosAFE :: modifyParameter {nameProc input nameParam pp_bRemoveDC newValue 1} &
- The
getParametersservice:
This service returns all the parameters of all currently running processors. It doesn’t have any parameter. Usage:
>> eltclsh > ::rosAFE::getParameters &
- The
getDependenciesservice:
This service returns the names of processor dependencies from the Input Processor to the requested processor.
Table 14 Input parameters of the getDependenciesservice of RosAFE¶Name Data type Default value Documentation nameProc string The name of the processor to search the dependencies Usage:
>> eltclsh > ::rosAFE::getDependencies {nameProc ratemap} &
getSignalservice:
This service allows to have access to the new audio representations computed by all currently running processors. The function doesn’t have any input parameter. The buffer size of this function is set by the user while requesting the Input Processor, see above.
Note
Requesting the outputs of all running processors is very demanding. All data must transit from the processor outputs to the user through the genomix interface, i.e. by using TCP/IP connections in between. It is then often a good idea to not set a too big buffer to this function. If a single processor output is needed, please use instead the available output ports (see below).
Usage:
>> eltclsh > ::rosAFE::getSignals {} &
removeProcessorservice:
The user may delete any processor any time, except the input processor. If the deleted processor was the dependency of some other processor (e.g. if it was the father of some another processors), all are destructed as well.
Table 15 Input parameters of the removeProcessorservice of RosAFE¶Name Data type Default value Documentation nameProc string The name of the processor to delete Usage :
>> eltclsh > ::rosAFE::removeProcessor {name preProc} &
Output Ports¶
The getSignal service mentioned above allow to reach all the computed auditory representations.
In parallel, each processor acts like a server and publishes its outcome on an individual port.
The size of this port is set by the user while requesting the Input Processor. Since those ports are
published directly to the ROS environment, both native ROS and TCL commands from eltclsh
can read them.
Native ROS Commands¶
Type the following command on a terminal to see all available ports.
$ rostopic list
Lets say there is a port called */rosAFE/preProcPort/dummyName*. The user can then use the commands
listed in Table 16 to access the ports data and statistics.
| Command Name | Documentation |
|---|---|
| rostopic bw | display bandwidth used by topic |
| rostopic delay | display delay for topic which has header |
| rostopic echo | print messages to screen |
| rostopic find | find topics by type |
| rostopic hz | display publishing rate of topic |
| rostopic info | print information about active topics |
| rostopic list | print information about active topics |
| rostopic pub | publish data to topic |
| rostopic type | print topic type |
For instance, to display the bandwidth used by the port */rosAFE/preProcPort/dummyName*, you can use
$ rostopic bw rosAFE/preProcPort/dummyName*
Accessing processor outputs with eltclsh¶
The following code will print the output of the processor to the eltclsh screen. Modify this code according to your needs by using Table 17.
>> eltclsh > ::rosAFE::preProcPort dummyName &
| Port Type | Message Type |
|---|---|
| /rosAFE/inputProcPort | rosAFE/rosAFE_TimeDomainSignalPortStruct |
| /rosAFE/preProcPort/ | rosAFE/rosAFE_TimeDomainSignalPortStruct |
| /rosAFE/gammatonePort/ | rosAFE/rosAFE_TimeFrequencySignalPortStruct |
| /rosAFE/ihcPort/ | rosAFE/rosAFE_TimeFrequencySignalPortStruct |
| /rosAFE/ildPort/ | rosAFE/rosAFE_TimeFrequencySignalPortStruct |
| /rosAFE/ratemapPort/ | rosAFE/rosAFE_TimeFrequencySignalPortStruct |
| /rosAFE/crossCorrelationPort/ | rosAFE/rosAFE_CrossCorrelationSignalPortStruct |
Matlab Commands¶
Instead of eltclsh, all the commands mentioned above can be directly called from within Matlab. To do so, use the following indications.
At first, the openrobot path should be added to the current workspace (modifiy this path depending on your current installation):
addpath(genpath('~/openrobots/lib/matlab'));
Then, the genomix client and the corresponding components must be loaded to make Matlab aware of their functionalities:
client = genomix.client;
bass = client.load('bass');
rosAFE = client.load('rosAFE');
You must then start the audio acquisition, which is handled by BASS:
acquire = bass.Acquire('-a');
% Check acquisition status
pause(0.2);
if ( strcmp(acquire.status,'error') )
error(strcat('Error',acquire.exception.ex));
end
Note
Do not forget to check your input device ID, see Writing a client of BASS.
Then, you must connect the BASS output port to /rosAFE:
connection = rosAFE.connect_port('Audio', 'bass/Audio');
% Check connection status
pause(0.2);
if ( strcmp(connection.status,'error') )
error(strcat('Error',connection.exception.ex));
end
Now, everything is ready for processors instantiation. Pay attention to the processor instantiation order, which must respect the processor tree shown in Fig. 10:
inputProcRequest = rosAFE.InputProc('-a');
preProcRequest = rosAFE.PreProc('-a', 'preProc', 'input', 0, 20, 0, 0.97, 0, 0.5, 0, 100, 0, 'jespen', 0);
gammatoneRequest = rosAFE.GammatoneProc('-a', 'gammatone', 'preProc', 'gammatone', 80, 8000, 1, 0, {}, 4, 1.018);
ihcRequest = rosAFE.IhcProc('-a');
ildRequest = rosAFE.IldProc('-a');
ratemapRequest = rosAFE.RatemapProc('-a');
crossCorrelationRequest = rosAFE.CrossCorrelationProc('-a');
Depending on your needs, you can use the different services of /rosAFE. They way they
must be called is listed below:
getParameters = rosAFE.getParameters();
getDependencies = rosAFE.getDependencies();
modifyParameter = rosAFE.modifyParameter();
getSignals = rosAFE.getSignals();
removeProcessor = rosAFE.removeProcessor();
In the same vein, on can also access to individual ports. The parameter to be used with the function
is the actual name of the processor you want to read the output. You can get this name by using the
getParameters function:
inputProcOut = rosAFE.inputProcPort('input');
preProcOut = rosAFE.preProcPort('preProc');
gammatoneProcOut = rosAFE.gammatonePort('gammatone');
ihcProcOut = rosAFE.ihcPort('ihc');
ildProcOut = rosAFE.ildPort('ild');
ratemapProcOut = rosAFE.ratemapProcPort('ratemap');
crossCorrelationProcOut = rosAFE.crossCorrelationPort('crossCorrelation');