Stereo-Vision Capture from Adream Building, CNRS Toulouse¶
 Published by members of the Two!Ears consortium
Published by members of the Two!Ears consortium
Description¶
This database contains views of the environment in the Adream-building, a robot-lab space consisting of a large hall that contains four small rooms without concrete windows, doors, and ceilings (Fig. 71). Impulse responses are available for this environment in Two!Ears, CNRS Toulouse, Adream-building.

Fig. 71 Lab space in the Adream building, look from above.
The views are taken from the robot’s perspective, using the calibrated stereovision system embedded on the robot (Fig. 72).
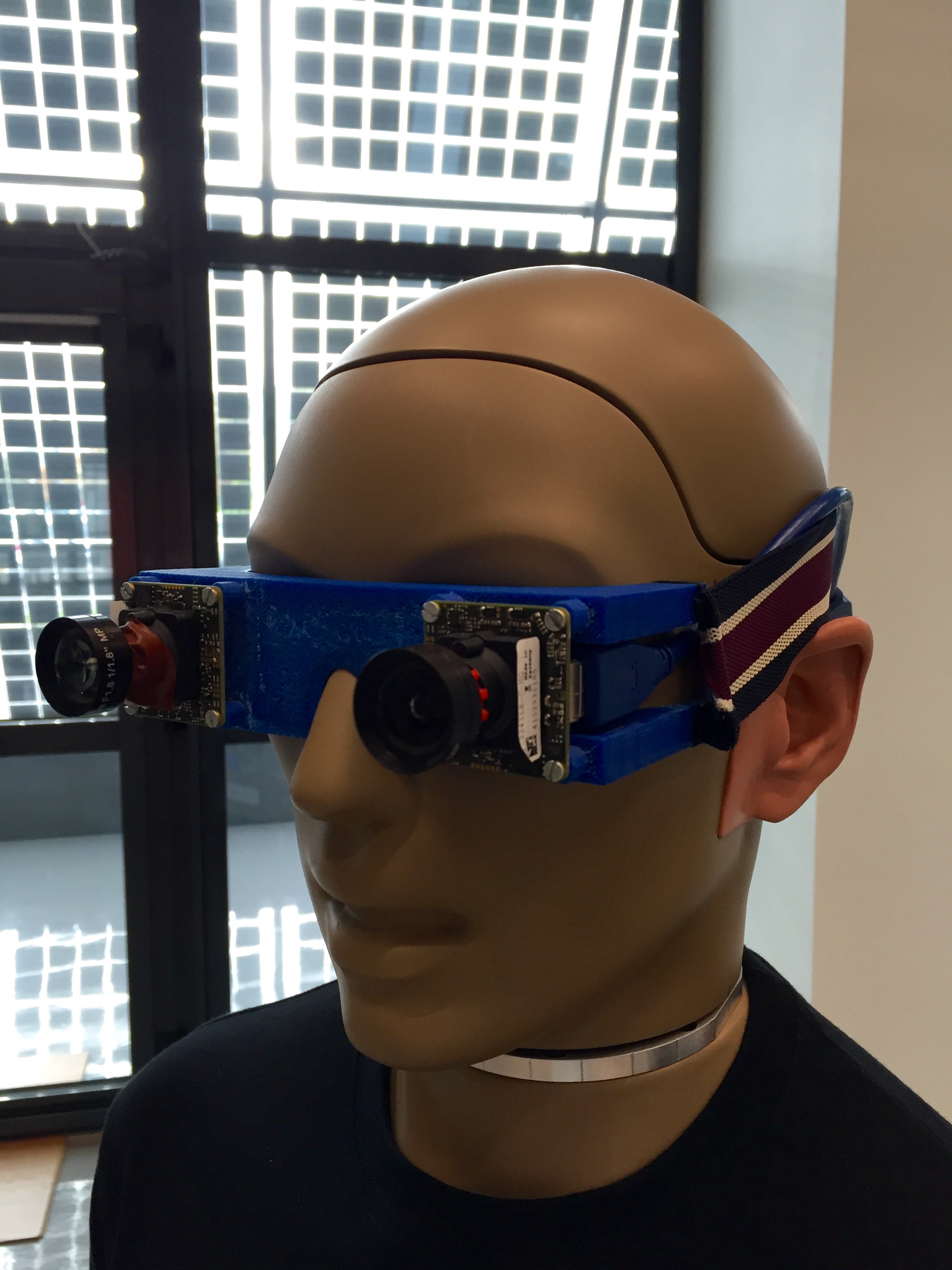
Fig. 72 KEMAR head with mounted stereo cameras.
Views are available with the robot in all four positions (Fig. 73) for which impulse responses of where measured in the BRIR dataset Two!Ears, CNRS Toulouse, Adream-building. For positions the head orientation ranges from -78° to 78° in 2° steps. For each position, raw and rectified images are available from both left and right cameras.
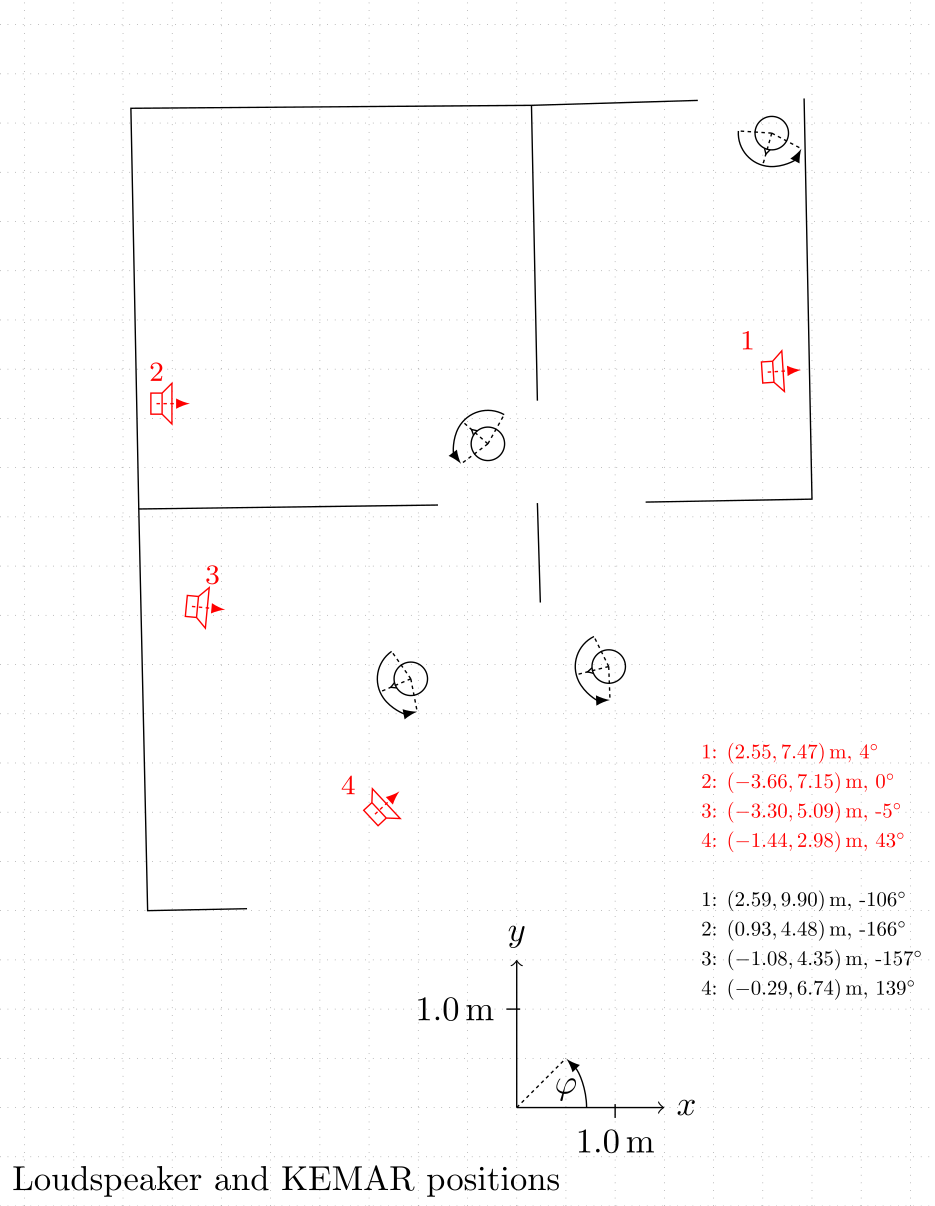
Fig. 73 Setup of the measurements. For details see the PDF version of this figure.
Files¶
All raw images are available under for respective position (1-4) are available at:
vision/twoears_stereo_adream/raw/pos1/*
vision/twoears_stereo_adream/raw/pos2/*
vision/twoears_stereo_adream/raw/pos3/*
vision/twoears_stereo_adream/raw/pos4/*
Rectified images were obtained from the raw images with the stereo_image_proc tool from ROS. They are available under (same structure as raw images):
vision/twoears_stereo_adream/rect
The calibration data of the stereovision system includes text files with the estimated parameters. This data were computed and saved by the camera_calibration tool from ROS. It is available under:
vision/twoears_stereo_adream/calib