Prediction of localisation in spatial audio systems¶
As we have seen in the example on Prediction of coloration in spatial audio systems WFS systems introduce errors at higher frequencies in the synthesized sound field that are perceivable as coloration compared to a reference sound field, that was the goal of the synthesis. Those errors do not exist at lower frequencies, which implies that localisation of the synthesised sound source deviates only slightly from performance in the reference sound field.
We did a huge set of listening test investigating localisation performance in WFS and NFC-HOA that are presented in 2013-11-01: Localisation of different source types in sound field synthesis.
In this example we choose the WFS system with a circular loudspeaker array and three different number of used loudspeakers synthesising a point source in front of the listener. The goal is to predict the perceived directions of that synthesised point source with the Two!Ears model.
Getting the listening test data¶
The experiment provides directly BRS files and a xml-file with the settings for the Binaural simulator. In the following we do an example run for one condition:
humanLabels = readHumanLabels(['experiments/2013-11-01_sfs_localisation/', ...
'human_label_localization_wfs_ps_circular.txt']);
brsFile = humanLabels{8,1};
If you look at the BRS file, you can easily decode the condition:
>> brsFile
brsFile =
experiments/2013-11-01_sfs_localisation/brs/wfs_nls14_X-0.50_Y0.75_src_ps_xs0.00_ys2.50.wav
This means that we had a WFS system with a circular loudspeaker array consisting of 14 loudspeakers synthesising a point source placed at (0.0, 2.5) m. The listener was placed at (-0.50, 0.75) m, which means slightly to the left and to the front inside the listening area.
Setting up the Binaural Simulator¶
Now, we start the Binaural simulator using the provided configuration file of the experiment and make some final adjustments like setting the length of the noise stimulus and rotate the head to the front as the localisation results will be relative to the head orientation:
sim = simulator.SimulatorConvexRoom(['experiments/', ...
'2013-11-01_sfs_localisation/2013-11-01_sfs_localisation.xml']);
sim.Sources{1}.IRDataset = simulator.DirectionalIR(brsFile);
sim.LengthOfSimulation = 5;
sim.rotateHead(0, 'absolute');
sim.Init = true;
Estimating the localisation with the Blackboard¶
For the actual prediction of the perceived direction we use the DnnLocationKS knowledge source, limit its upper frequency range to 1400 Hz, and setup the Blackboard system for localisation without head rotations, see Localisation with and without head rotations for details:
bbs = BlackboardSystem(0);
bbs.setRobotConnect(sim);
bbs.buildFromXml('Blackboard.xml');
bbs.run();
Verify the results¶
Now the prediction has finished and we have to inspect the result and compare it to the result from the listening test. The prediction is stored inside the Blackboard system and can be requested with:
>> predictedAzimuths = bbs.blackboard.getData('perceivedAzimuths')
predictedAzimuths =
1x8 struct array with fields:
sndTmIdx
data
As the perceivedAzimuths is a data structure containing the results for
every time step of the block-based processing, we provide a function that
evaluates that data and provides us with an average value over time:
>> predictedAzimuth = evaluateLocalisationResults(predictedAzimuths)
predictedAzimuth =
-14.8087
During the experiment a jitter was applied to the zero degree head orientation of the binaural synthesis system in order to have a larger spread of possible perceived directions. This jitter is stored as well in the results of the listening test and has to be added to the predicted azimuth:
headRotationOffset = humanLabels{8,9};
predictedAzimuth = predictedAzimuth + headRotationOffset;
perceivedAzimuth = humanLabels{8,4};
After that we can compare the result to the one from the listening test:
>> fprintf(1, ['\nPerceived direction: %.1f deg\n', ...
'Predicted direction: %.1f deg\n'], ...
perceivedAzimuth, predictedAzimuth);
Perceived direction: -14.5 deg
Predicted direction: -16.8 deg
If you would like to do this for all listening positions, you can go to the
examples/qoe_localisation folder and execute the following command:
>> localisationWfsCircularPointSource
This will predict the directions for every listener position and plots the results at the end in comparison to the listening test results. Figure Fig. 78 shows the result.
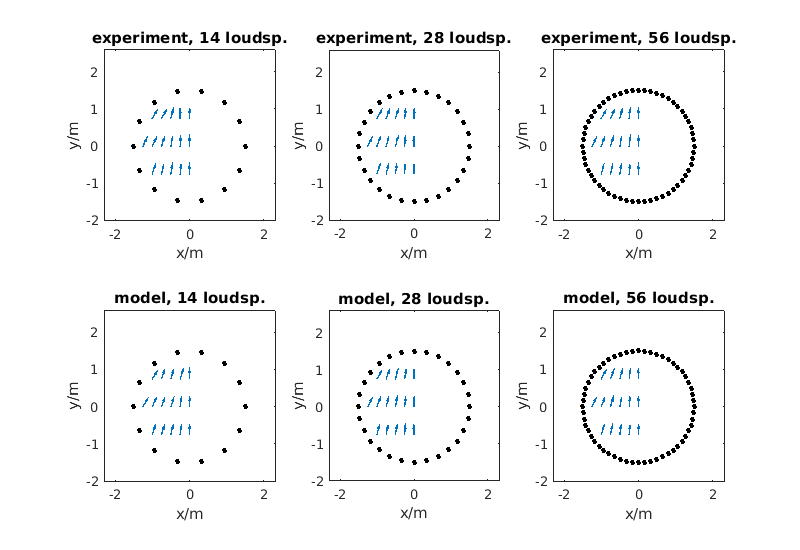
Fig. 78 Localisation results and model predictions. The black symbols indicate the loudspeakers. On every listening position an arrow is pointing into the direction the listener perceived the corresponding auditory event.